Task Description
At its core, this competition is based on real dual-arm humanoid robots, with several tasks thoughtfully prepared that are highly representative of typical industrial applications workflow. In addition, a simulation environment that closely resembles the task workflows of the real robot is also provided, along with open access to high-quality task datasets, evaluation scripts, complete execution pipelines, online evaluation servers and ready-to-run baseline code. The simulation track is especially designed for competitors to familiarise themselves with the Kuavo robot dataset formats, algorithm development and algorithm testing with our baseline code. It also simulates and selects teams with highly matured algorithms that are highly worthy of real-robot competition in a fair manner.
Simulation Task Description
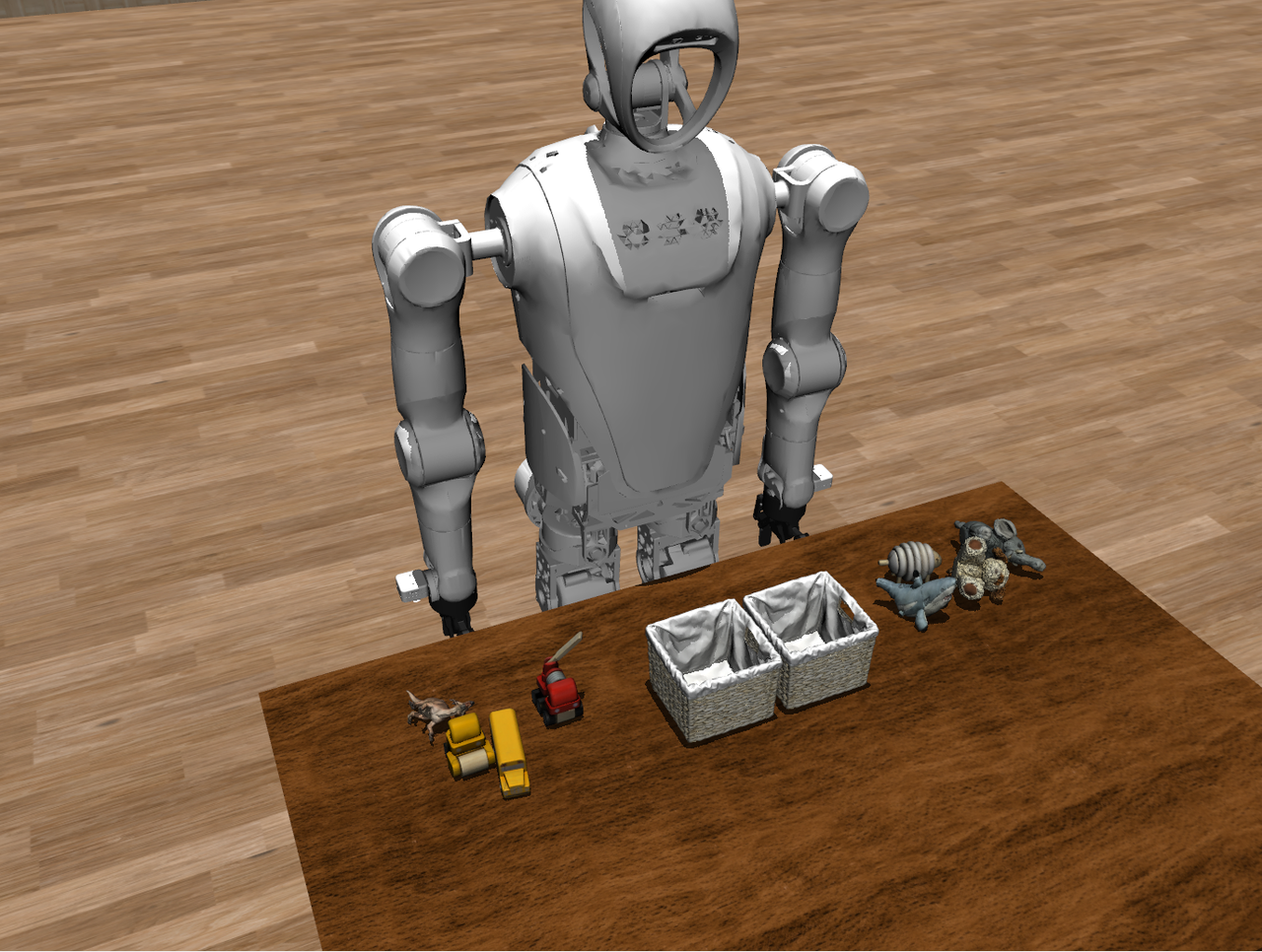
Task 1: Toy Sorting
In this task, there will be assorted toys randomly laid out on a desk surface. The robot needs to grasp the toys, and place all the animal toys into the right basket, while all the car toys go into the left basket.
Within this task, the robot will start from a reasonable randomised location away from the desk; the height of the desk as well as the assortment of toys on the desk are also randomised.
- Scoring standards:
40 pts for every correct placement of each of the toys
20 pts for completing it within a specified timeframe. 1-pt penalty will be applied for every second elapsed outside of this timeframe
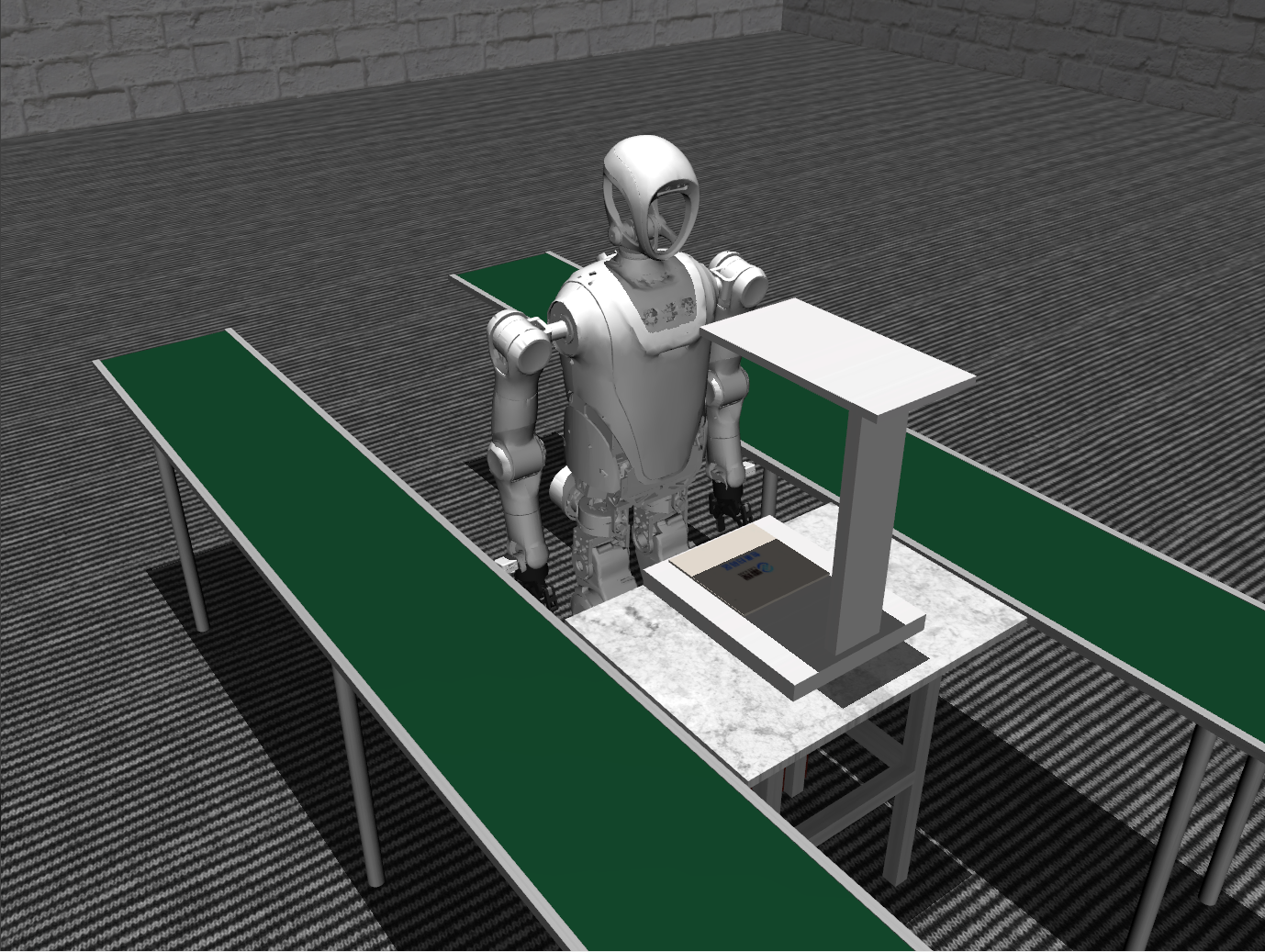
Task 2: Parcel Weighing
In this task, the robot is required to pick up a soft-pouch express parcel from a moving conveyor belt, place it on an electronic scale for weighing, and then transfer it to another conveyor belt.
Within this task, the positioning of the parcel and the scale will be randomised within a reasonable range.
Each task is out of 100 base points as the base task score.
- Scoring standards:
40 pts for the correct placement of the object onto its desginated area (the electronic scale)
40 pts for the correct placement of the object after weighing
20 pts for completing it within a specified timeframe. 1-pt penalty will be applied for every second elapsed outside of this timeframe
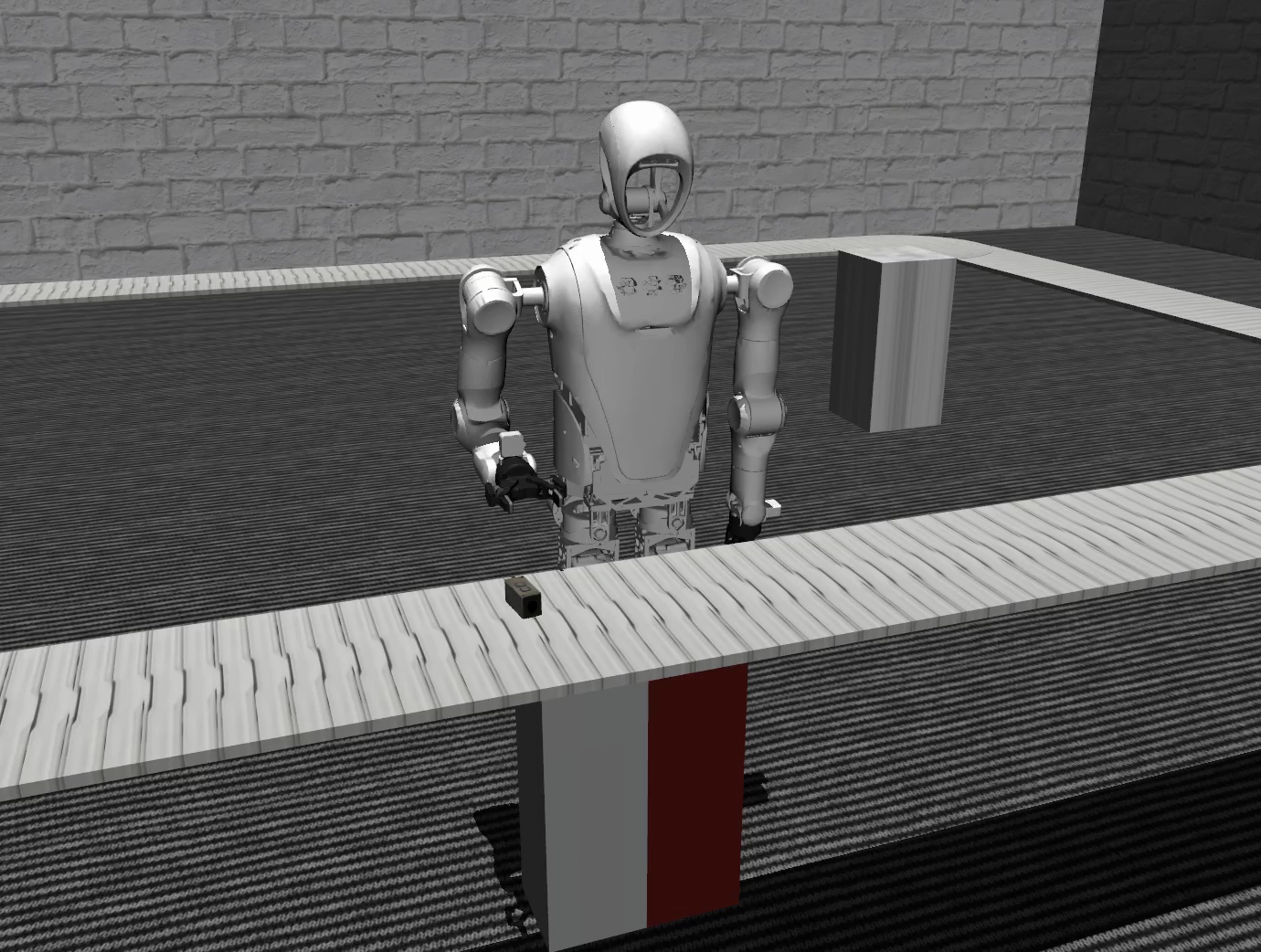
Task 3: Conveyor Belt Parts Sorting
In this task, the robot needs to pick up a component chosen from different categories representative in the industrial setting, lying in a randomised orientation on a moving conveyor belt, and then place the component into the correct sorting bin. Four such components are given in this task, and the task is considered as successful after correct placements of all four such components.
Within this task, the height of the conveyor, the positioning and orientation of the component, as well as when the component will be dropped off onto the conveyor belt, will be randomised within a reasonable range.
- Scoring standards:
20 pts for each successful sequence of grasp and final placement of each of the components
10 pts for successful completion of all four components in a row
10 pts for completing it within a specified timeframe. 1-pt penalty will be applied for every second elapsed outside of this timeframe
Real-machine Task Description
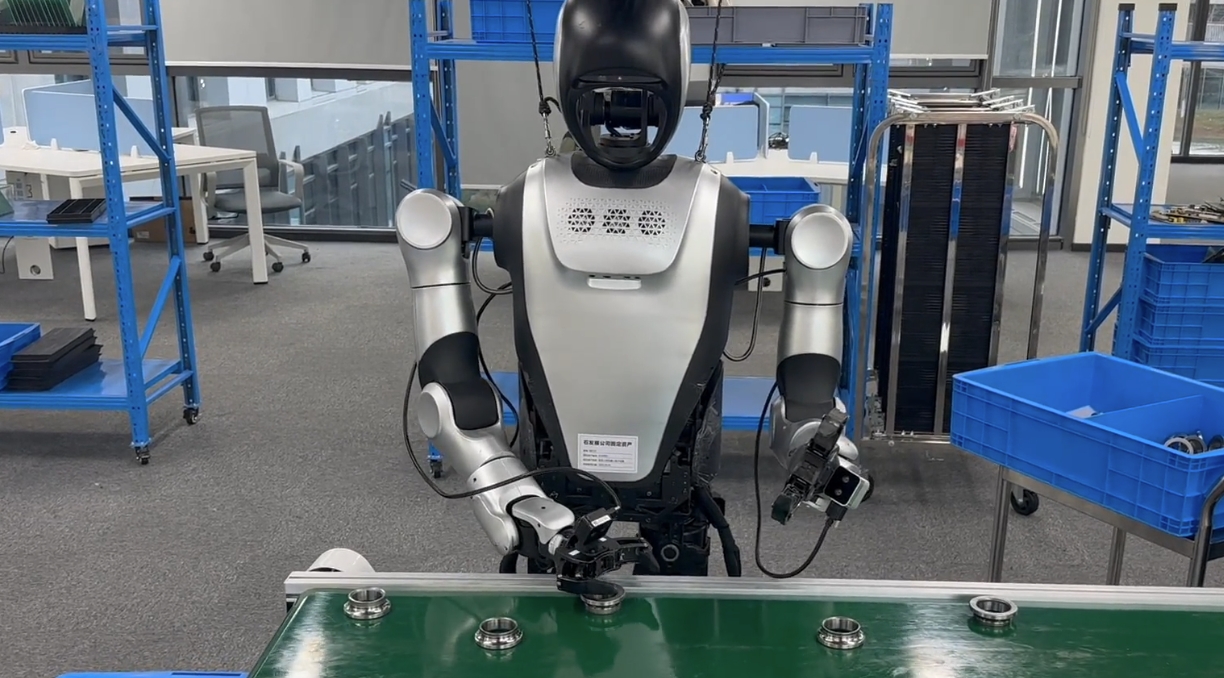
Task 1: Small Part Flipping
Task Description: The robot stands next to a stationary conveyor belt, picks up a small part from the conveyor belt, flips it over, and then places it back on the conveyor belt.
- Key Challenges:
Stable grasping of ring-shaped objects;
Random positioning of target objects (within working range);
Precise control of flipping small objects.
Task 2: Express Package Scanning
Task Description: The robot picks up an express package and places it on the scanning platform with the label facing up. After scanning is complete, the robot places the package on the conveyor belt.
- Key Challenges:
Stable grasping of soft packages;
Coordinated dual-arm operation;
Precise control of flipping soft objects.

Task 3: Bottling
Task Description: The robot randomly picks one daily chemical product from a cluttered shelf, rotates it by a certain angle, and places it on the target conveyor belt nearby.
- Key Challenges:
Dual-hand coordination and object handover;
Precise pose control;
Spatial constraint satisfaction.

On-site Task Description
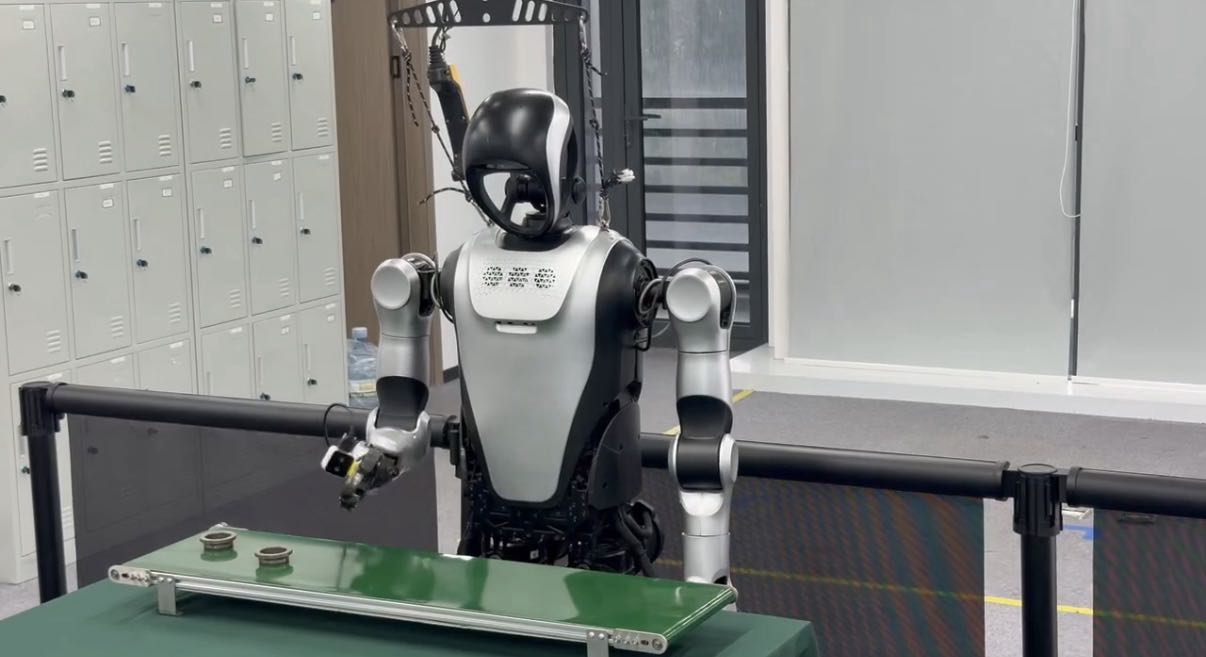
Task 1: Metal Parts Righting
Task Description: The robot flips small metal parts from face-down to face-up on a conveyor belt. In Level 1, the conveyor is stationary and the parts are within reach. In Level 2, the conveyor is moving and the robot must identify face-up parts and skip them correctly.
- Key Challenges:
Stable grasping and flipping of small metal parts;
Accurate face-up / face-down recognition under conveyor motion;
Precise flip-and-place execution under time constraints.
Level 1
Level 2

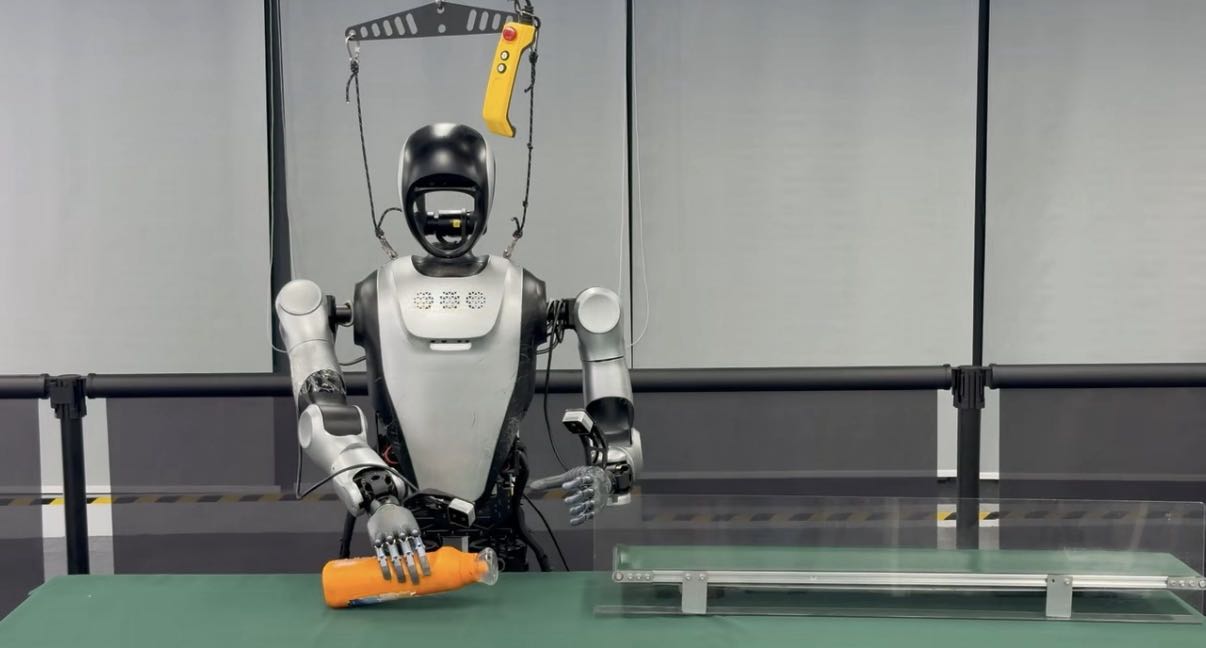
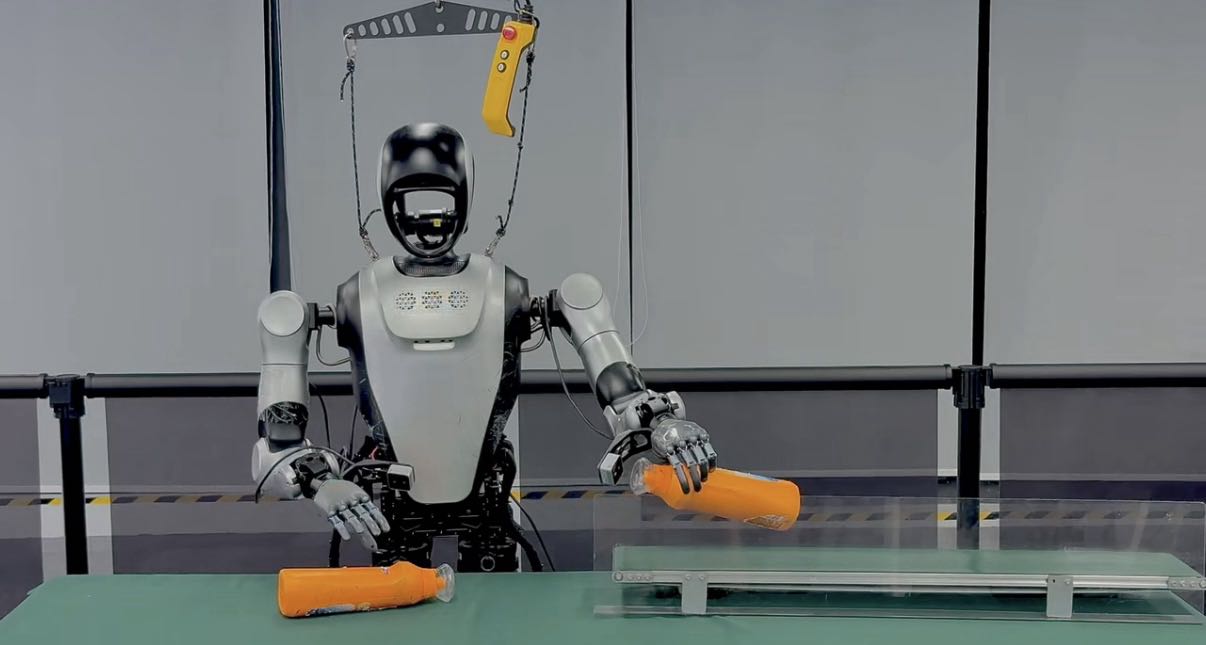
Task 2: Daily Chemical Bottle Pick & Place
Task Description: The robot grasps daily chemical bottles and performs in-air bimanual handover before placing them on a conveyor belt. In Level 1, one bottle is processed. In Level 2, two bottles are processed sequentially.
- Key Challenges:
Stable grasping of daily chemical bottles;
Coordinated in-air bimanual handover;
Sequential manipulation under random placement and limited workspace.
Level 1
Level 2
Task 3: Express Package Scanning
Task Description: The robot handles express parcels by placing them on a scanning table, correcting label orientation, and transferring them to the conveyor belt. In Level 1, two parcels are processed sequentially. In Level 2, three parcels are processed simultaneously.
- Key Challenges:
Reliable grasping and transfer of soft parcels;
Accurate label-orientation recognition and correction;
Efficient multi-parcel workflow planning under time constraints.
Level 1

Level 2
